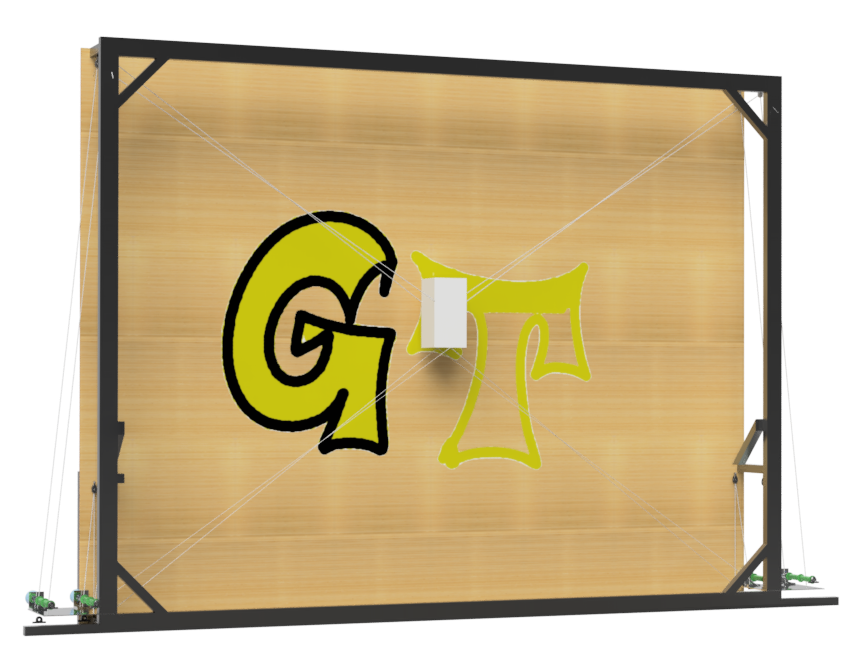
Frank Dellaert's lab at Georgia Tech has a dream to bring factor graphs to all areas of robotics and beyond. Part of that goal involves maintaining and developing GTSAM, but part of it also involves showcasing how factor graphs can be used to efficiently, intuitively, and beautifully solve a wide variety of problems in perception, motion planning, dynamics, and beyond. My current project is to build and control a cable robot for painting graffiti. Cable robot control is notoriously difficult due to the nonlinear coupled forward dynamics, constraints, and nonidealities, but the difficulties in control are offset by their scalability, cost, and speed.
Activities/Experiences
This page was more relevant in college, but these:
are now more relevant ways to see what I'm up to!
Current
Past
I've long been involved in teaching, TAing, or tutoring in various capacities and settings. Most recently, I got to teach an undergrad course at Georgia Tech! I've historically viewed it as a way simultaneously to give back where I can and to refresh and solidify my knowledge. Click the dropdowns to see more details.
Instructor:
CS3630 - Intro to Perception and Robotics (Summer 2022) - Course Website
Teaching Assistant:
CS3630 - Intro to Perception and Robotics (Fall 2019) - Syllabus
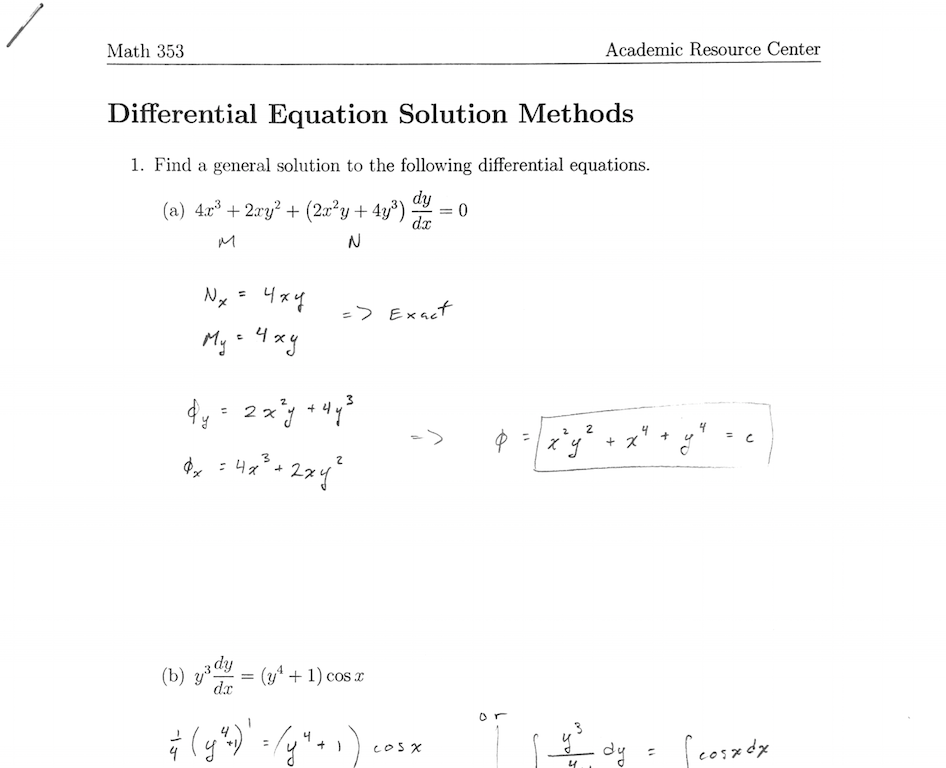
Math Study Groups are designed to serve as supplemental recitations where we work through problems from a worksheet and/or any unclarities students may have. I ran them for about 3 years (Fall 2016 - Spring 2019) and have led Multivariable Calc., Linear Algebra, and Diff. Eq. Some worksheet examples are available here.
Teaching Assistant - I've been TAing since Fall 2016 and I've TA-d:
- EGR201 grading/OH (Statics).
- ECE230 lab (Microelectronics)
- CS201 recitation (Data Structures+Algorithms)
- EGR103 lab (intro to Matlab, LaTeX, etc)
Peer Tutoring is a program at Duke for students to get free one-on-one tutoring by a (paid) peer. I tutored multivariable calculus and linear algebra from Fall 2016 to Spring 2017.
America Reads America Counts is a program where Duke students go to local elementary and middle schools to help in the classroom, both in one-on-one and group settings.
Kumon Math and Reading Center of Fox Chapel - is a franchise of the Kumon program. There, I created personalized curriculums, tutored, graded, and communicated with parents among other things. Kumon covers pre-counting to Calc 2 and ABC's to Shakespeare, with the majority of students in late elementary school.
Private Tutoring - I tutored privately on both paid and volunteer bases.
Math Help Room was a place at school where students could get help on homework or studying during homeroom.
Volunteers of America aimed to improve literacy and math skills amongst low income children.
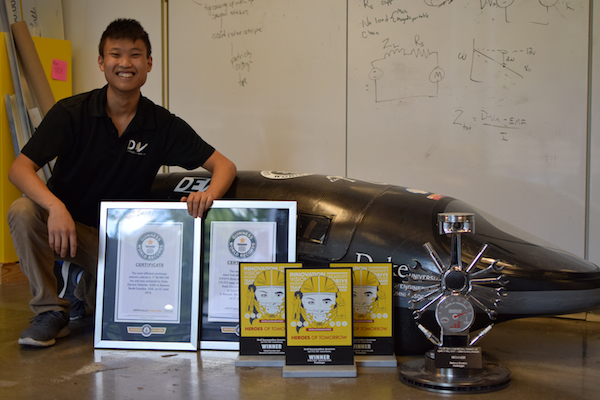
We compete to create the most efficient vehicle possible. In July, 2018, we broke the world record for the most fuel efficient vehicle in history at 14,573 MPGe with our hydrogen fuel cell vehicle, Maxwell. In June 2019, we broke another world record for the most efficient electric vehicle at 27,482 MPGe with our battery-electric vehicle, Eta. Myself and my best friend Shomik were co-presidents in 2019 and designed the brand-new hydrogen fuel cell and supercapacitor hybrid system in 2018. Another best friend, Patrick Grady, was president in 2018 and instrumental in our success even after his graduation.
In 2019, I also lead the self-driving initiative as co-president of the club in which we successfully demonstrated the autonomous operation of our vehicle [video]. We are advised by Dr. Nico Hotz.
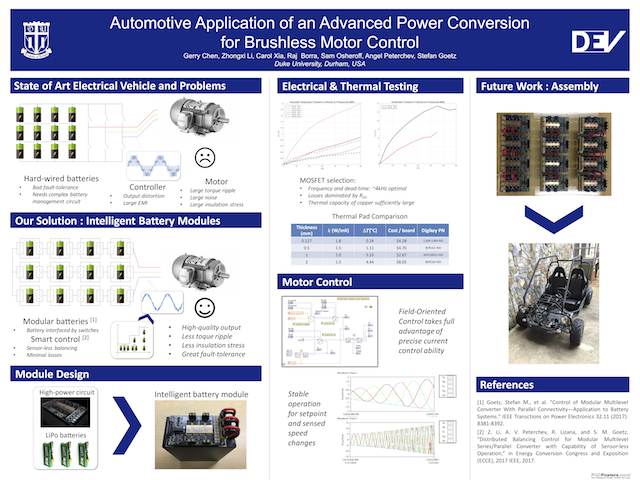
The Brain Stimulation Engineering Lab is led by Professor Angel Peterchev. In addition to trans-cranial brain stimulation, the lab does research in power electronics. I work with Zhongxi Li, Prof. Stefan Goetz, and Prof. Peterchev on using a novel modular multilevel series-parallel converter (MMSPC) in a motor control application. The end goal is to install these MMSPC modules on a "dune-buggy" to create a self-cell-balancing, ultra low-noise motor controller/battery management controller. Unfortunately, our recent paper wasn't accepted, but I'm sure the next revision will be!
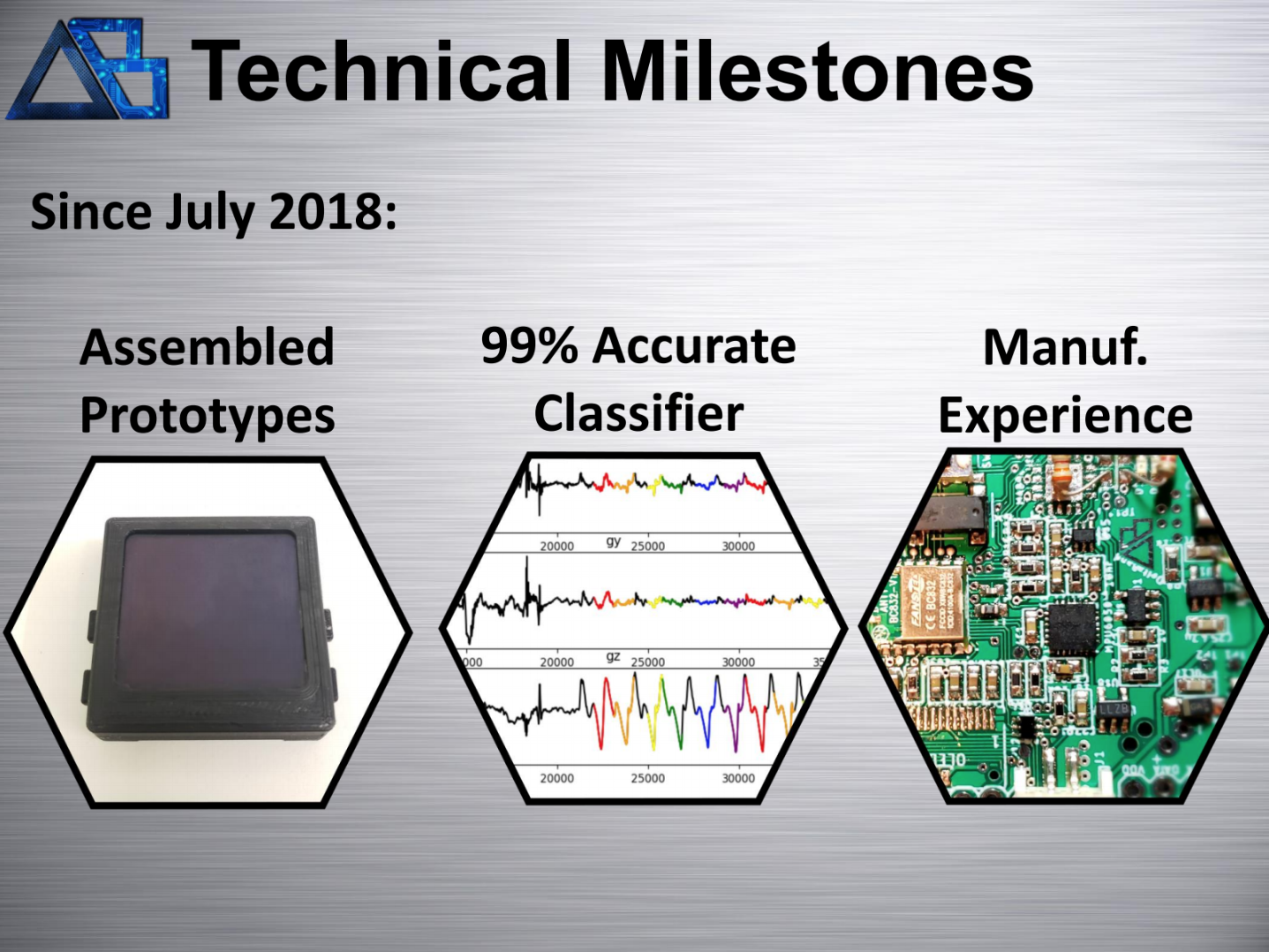
DeltaBand is a startup founded by myself, Matt Spettel, and Gabe Madonna. We build a fitness tracker specifically targeted towards weight lifters to track every rep, set, and exercise. We've conducted thorough market research, have 10+ generations of prototypes, and design state-of-the art machine learning algorithms. We're now undergoing beta-testing and expect to launch our first commercial product in Spring, 2019. I serve as CTO and, as such, am responsible for all electrical and embedded design.

The Intelligent Motion Labratory (IML) is led by Professor Kris Hauser. Starting in the Spring of 2017 and continuing through the Summer via a generous REU sponsorship, I've been working with Ph.D. student Fan Wang designing a robot attachment to robustly actuate switches, buttons, knobs, and other electronic input forms designed for human use. The project is part of a larger one to create a nursing robot named TRINA. Our project involves two primary components: (1) refining a standalone system which can consistently and autonomously actuate a wide variety of buttons, and (2) integrating the standalone system on the Baxter robot and coordinate motion planning to reach desired buttons with minimal manipulability at the end joint configuration. Our paper was accepted to the 2018 IEEE International Conference on Robotics and Automation (ICRA). Check out this video to see the PPU standalone system in action.
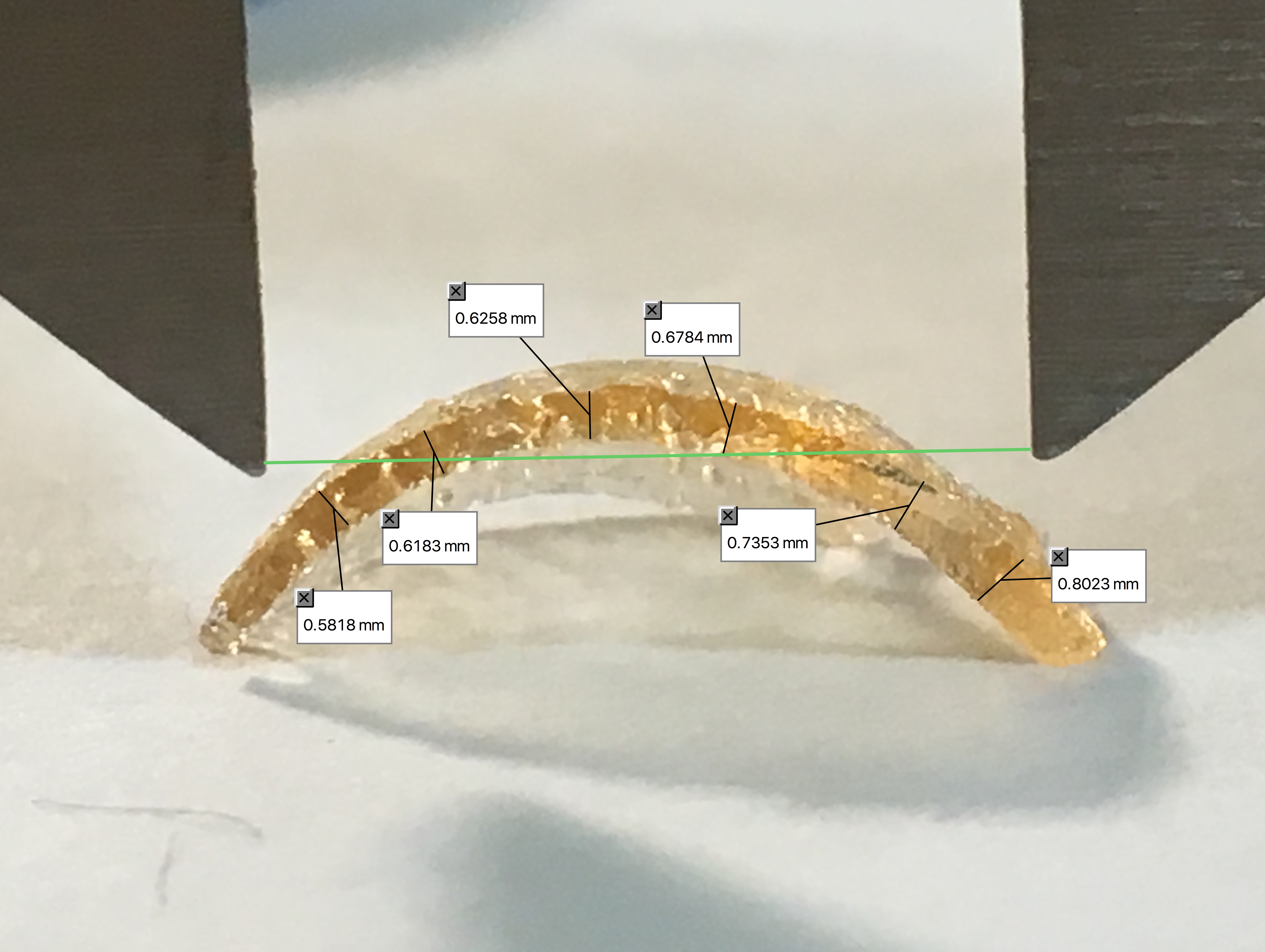
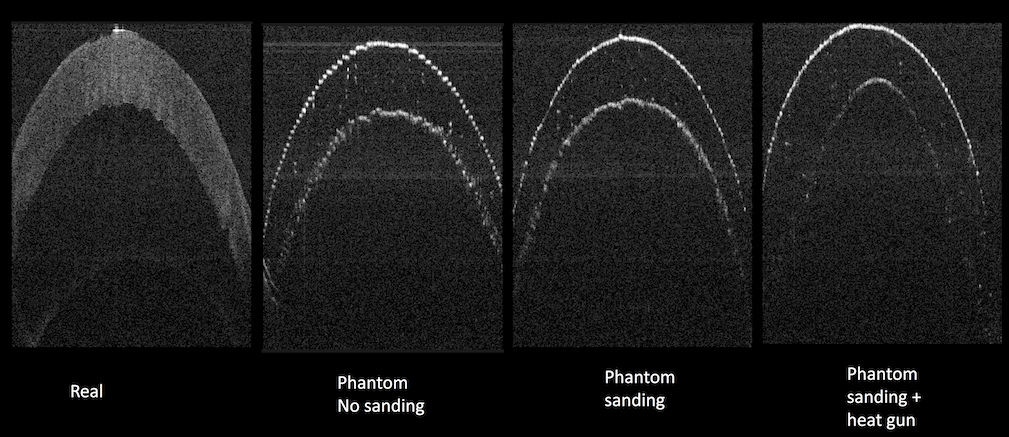
Starting in September 2017, I've been helping Mark Draelos and Brenton Keller who are working on computer-assisted surgery guided by three-dimensional imaging. Specifically, I have been designing replicas of corneas for them to be able to perform testing more easily and with much greater volume than their previous testing with limited cadaver corneas.

In this project, I lead a team of 5-10 fellow students to install solar powered phone chargers and night-time LED-lighting on Duke University's iconic blue-topped swinging benches. The project was started in early 2016 under the Duke University Smart Home and I took leadership starting the summer of 2016. As of Summer 2017, we 2 completed installations on campus. Prototyping has been possible thanks to funding from the Duke Student Government, Duke's Engineering Student Government, Duke's Energy Initiative Fund, and the Duke Smart Home. Duke's Housing, Dining, and Residential Life (HDRL) management has been and will be playing a major role in funding campus installations.