FPGA Robot Racers
Dec 2021
Summary
This was a class final project for ECE 350 (“the FPGA class”) to implement something fun on an FPGA.
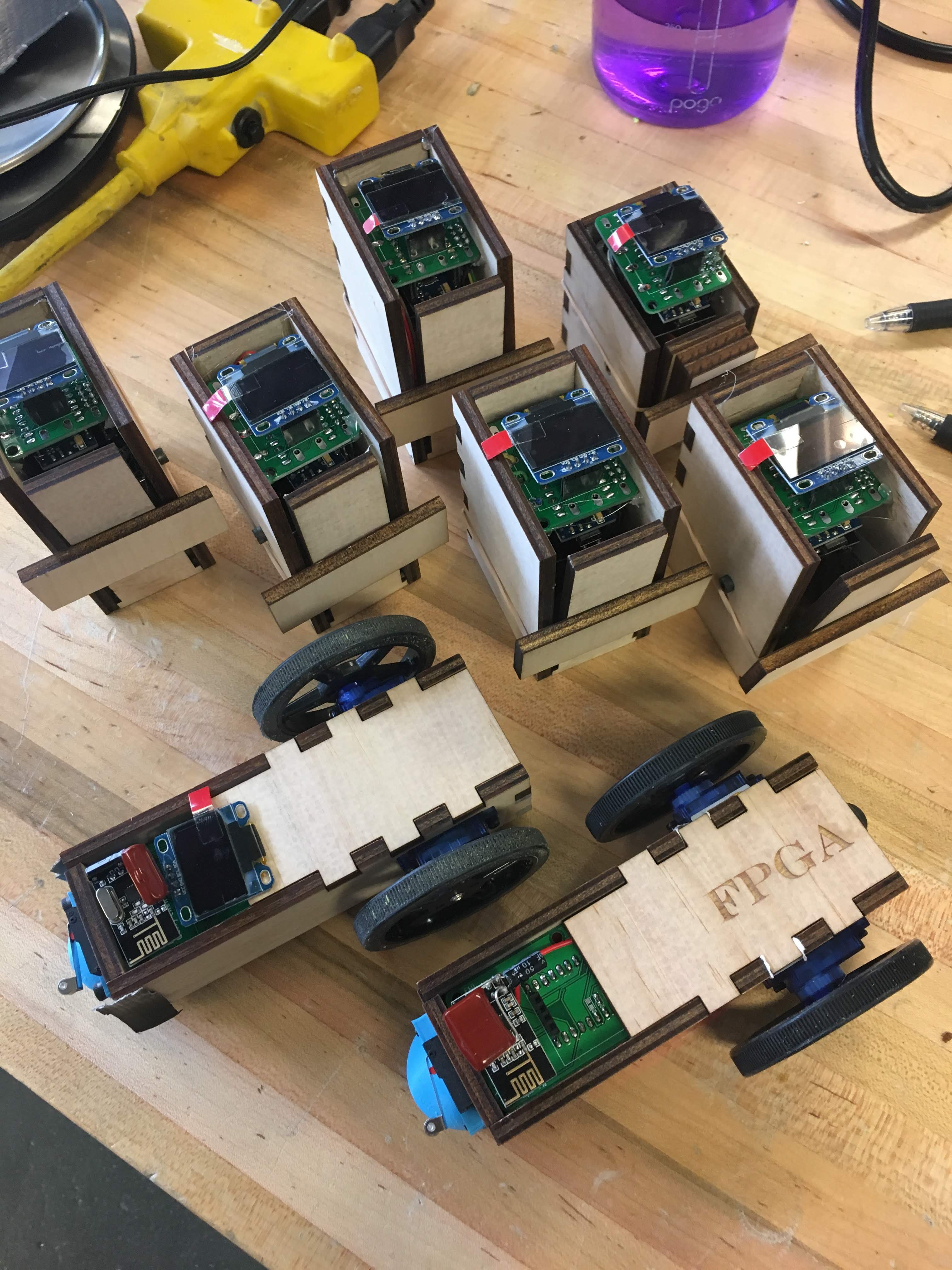
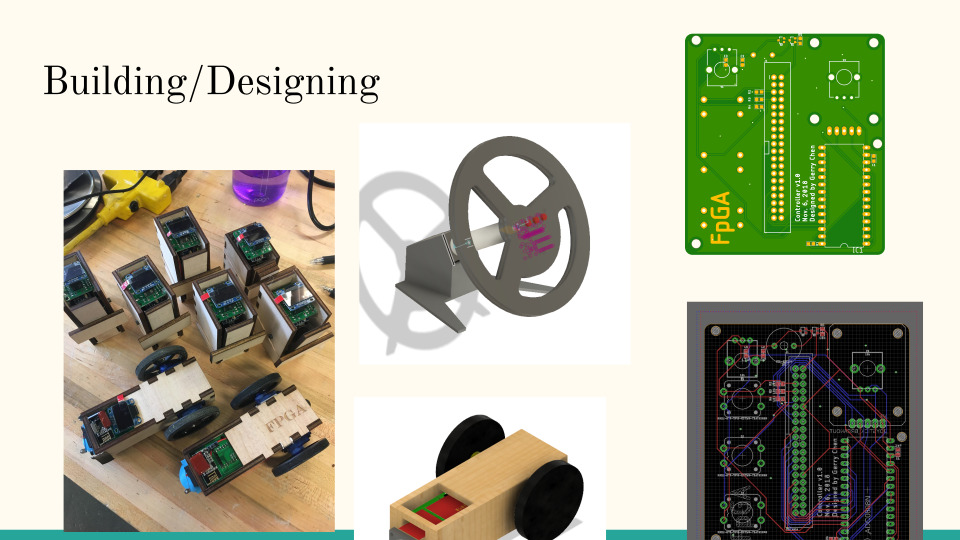
To make a slightly more flashy demo without as much FPGA effort, we decided to leverage my prior skills to create these robot racers and “checkpoint” sensors.
We used 2 FPGAs: one to read the steering wheel inputs and send commands to the robots, and one to receive the “checkpoint” sensor inputs and display the score/game state on the monitor.
The FPGAs were running our pipelined CPU implementation, with the game logic being implemented in “MIPS” assembly. Of course, this was more of an academic exercise than a realistically useful way to implement the project.